Yutian Chen 陈昱天
Ph.D. in Computer Science
BSc. Computer Science, Minor in Mathematical Science
Find me at
About Me
I am a Ph.D. student in Computer Science at Stanford University working with Prof. Shuran Song. Previously, I have had the honor of collaborating with Prof. Sebastian Scherer and Dr. Yuheng Qiu in the AirLab at CMU, Prof. Koushil Sreenath at Amazon Frontier AI Robotics (FAR), Prof. Chen Wang at the University at Buffalo, and Prof. Chuang Gan at the MIT-IBM Watson AI Lab. My research focuses on enabling machines to understand and interact with the physical reality through robust geometric and semantic perception. I am broadly interested in visual geometry, spatial reasoning, and the development of scalable algorithms that bridge perception and action for autonomous systems.
Research Highlights

Open Source Projects
Experience
As an intern Member of Technical Staff, where I have the honor of working with Professor Koushil Sreenath on an IMU foundation model for human and humanoid motion — a robust, generalizable encoder for multiple downstream tasks.
Spatial AI & Visual-Inertial SLAM
The AirLab, Robotics Institue, Carnegie Mellon UniversityWorking with Professor Sebastian Scherer and Dr. Yuheng Qiu, I aimed to construct robust and accurate visual-inertial SLAM system using data-driven approach. I Developed the MAC-VO, an award-winning SoTA visual odometry that is generalizable everywhere (even the lunar surface 🌕!). I also worked extensively on IMU and visual-inerital system to create low-latency and robust state estimation system for real-world deployment.
Papers
- MAC-VO: Metric-Aware Covariance for Learning-based Stereo Visual OdometryICRA 2025
ICRA 2025 Best Conference Paper Award
Best Paper Award on Robot Perception
- PyPose v0.6: The Imperative Programming Interface for RoboticsIROS Workshop 2023
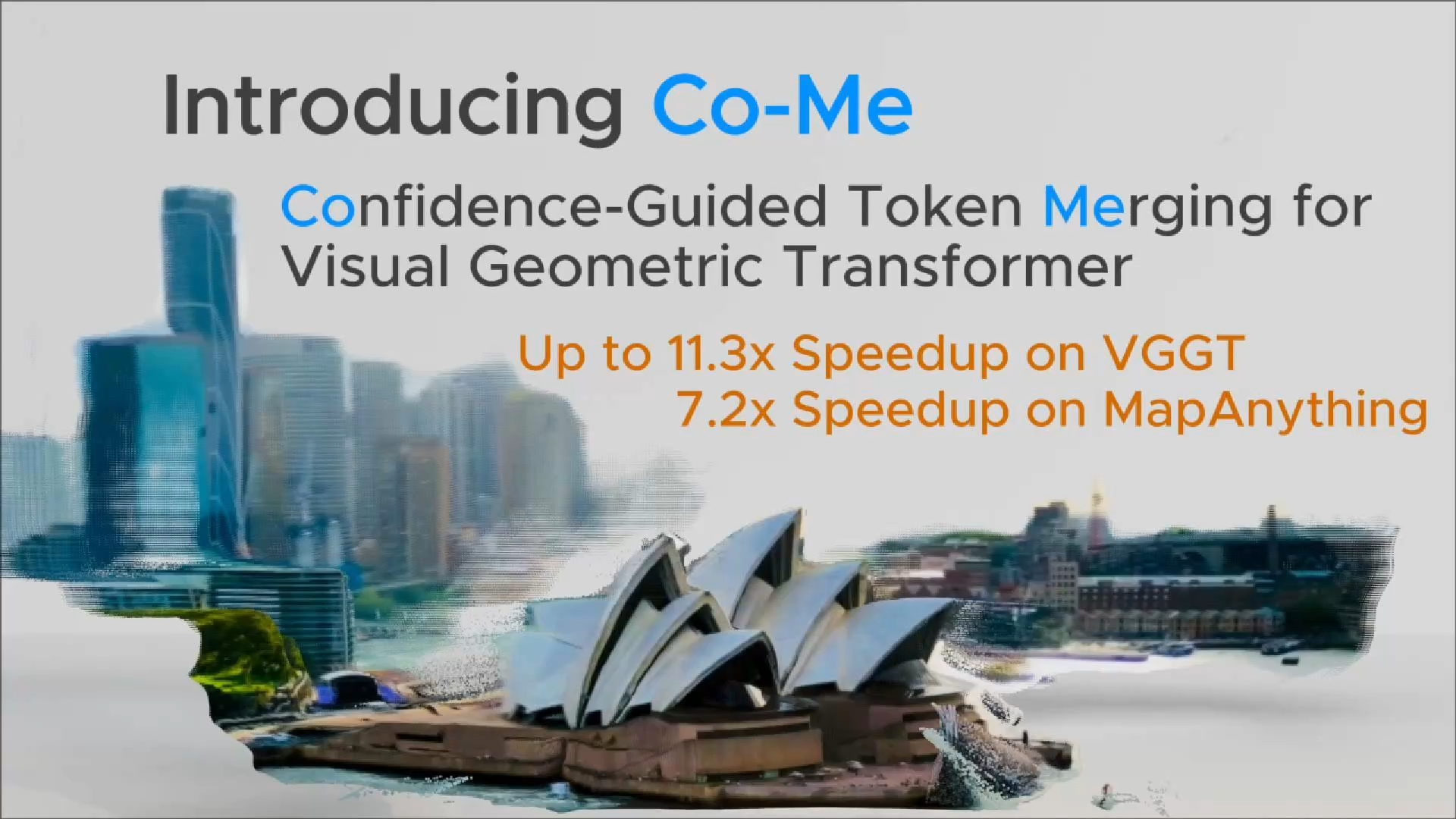
Working with Dr. Jay Patrikar, we propose the Confidence-Guided Token Merging (Co-Me), a training-free acceleration method for visual geometric transformers that identifies and merges low-confidence tokens to reduce computation while preserving spatial fidelity. By leveraging a distilled confidence predictor, Co-Me delivers substantial speedups across models like VGGT (up to 11.3x) and MapAnything (up to 7.8x), enabling real-time 3D perception.
Working with Professor Chuang Gan, I developed a data pipeline for City-scale 3D scene reconstruction based on real world satellite/street-view image for multi-agent simulator.
Working with Professor Rita Singh and Bhiksha Raj, built a LLM-generated content detector called "LLM-Sentinel". Reaches 98% accuracy on test dataset and outperform existing content detector by OpenAI and ZeroGPT. Collected the OpenLLMText dataset, a dataset contains 30k human written text from OpenWebText and its corresponding rephrased version by various LLMs such as GPT3.5, LLaMA, PaLM, etc.
Mentored by Professor Yiyu Shi and Dr. Xiaowei Xu, I proposed an encoder-decoder architecture to perform semantic segmentation on cardiac MRI sequence. By introducing Temporal constraint on segmentation result, the model improved the accuracy by 2% on ACDC Dataset comparing to the baseline model.
- Myocardial Segmentation of Cardiac MRI Sequences With Temporal Consistency for Coronary Artery Disease DiagnosisFrontier Cardiovascular Medicine 2022
Fun Fact
There are at least two other (Yutian Chen)s actively working in AI research. If I'm not the one you are looking for, you might want to check on their homepages:
Research Motto
Good research is about solving the important problem at the right time, with simple methods and solid engineering.